
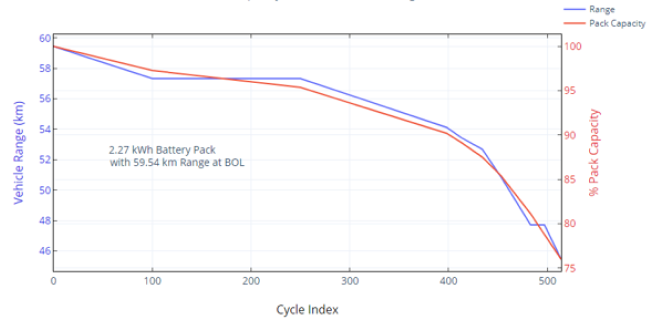
Battery Modeling and the Goldilocks Zone Get Started Contact Us...
Read More

India’s Electric Vehicle Market: A Look Back at 2023
India’s Electric Vehicle Market: A Look Back at 2023 Get...
Read More
Hybrid Modeling: Bridging Physics and Machine Learning
Hybrid Modeling: Bridging Physics and Machine Learning Get Started Contact...
Read More